Nostalgia
April 22, 2026
Tomodachi Life: Living the Dream recently released and I've been seeing everyone play it. It brought back so many memories of playing the original Tomodachi Life on the Nintendo 3DS back in the day.
Revisiting that nostalgia made me remember that I was also curious about how these games worked. I've never used a Game Boy Advance, but how does a system as limited as the GBA handle everything from sprite rendering to input to game logic so seamlessly? What's really happening behind the scenes when a game feels this responsive and alive?
Even besides that, how is it possible that something that isn't a GBA can run GBA games at all?
After doing some research, most of the concepts behind how emulators work were familiar to me. Memory management, hardware interrupts, I/O & DMA, and much more were all concepts I had learned recently while studying computer architecture and operating systems.
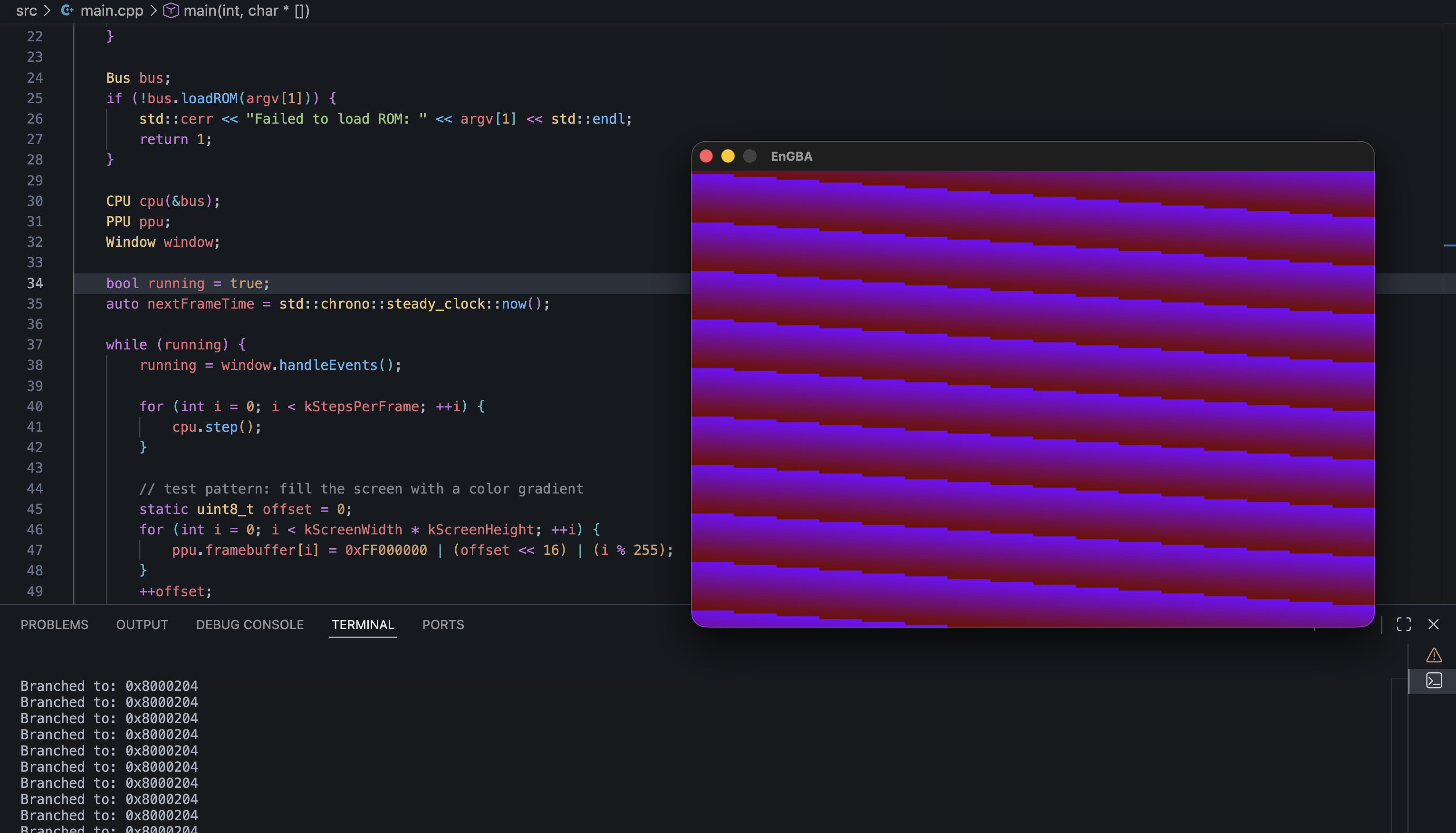
So, that was enough for me to decide to build the GBA emulator, it'll be fun of course, but challenging enough to keep me learning and engaged for a while, and I can document the process along the way.
— Montasir